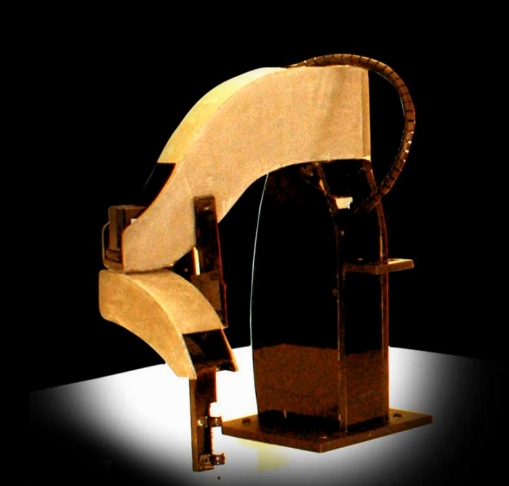










ربات اسكارا
بازوي سوم اين ربات شبيه سازي شده و دو لينك آن ساخته شده است.
امروزه از روباتها در بسیاري از کارهایی که احتیاج به دقت و سرعت بالا دارند استفاده میگردد. از آن جمله میتوان به استفاده از رباتها در خطوط مونتاژ، پزشکی، ماشینکاري و دهها کاربرد دیگر اشاره نمود. استفاده از رباتهاي صنعتی در فرایندهاي تولید و اتوماسیون صنعتی در دهههاي اخیر رشد قابل توجهی کردهاست.
هدف از انجام این پروژه، طراحی، شبیهسازی و ساخت بازوی دو لینکی سری صفحهای است. این ربات آموزشی کاربردی برای مجهزکردن آزمایشگاه رباتیک مؤسسه آموزش عالی اقباللاهوری ساخته شدهاست. این ربات شامل دو بازوی صفحه ای، دو مفصل چرخشی و پایه ثابت می باشد. در جدول زیر مشخصات ربات ذکر شده است.
مشخصات روبات:
|
ساختار مكانيكي |
بندبند،بازو به طور كامل محصور افقي |
|
|
تعداد محور |
2 محور |
|
|
حداكثر شعاع عملياتي |
620 cm |
|
|
حركت محور محور1: لينك اول محور 2: لينك دوم |
محدوده محور 150-30 درجه 40-140 درجه
|
سرعت مؤثر 60 rpm 60 rpm
|
|
عملگردها |
60PH20 و86PH45 موتور پله اي |
|
|
انتقال توان |
شافت |
|
|
دماي عملياتي |
2°-40°C(36°-104°F) |
|